
GOGOA Revoluciona la Neurociencia: Controladores Basados en Generadores Centrales de Patrones Redefinen la Asistencia a la Movilidad
- Gogoa Mobility Robots
- 22 feb 2024
- 4 min de lectura

En un emocionante avance hacia una neurorrehabilitación más efectiva y personalizada, Gogoa Mobility Robots está a punto de cambiar el panorama con su desarrollo innovador basado en la teoría de Generadores Centrales de Patrones (GCPs).
Estos GCPs, descritos como redes neuronales que generan patrones rítmicos de forma endógena, representan un hito importante en la comprensión y aplicación de la neuroingeniería para mejorar la movilidad en pacientes con lesiones neurológicas.
Imagínate esto: al principio del proceso de neurorrehabilitación robótica , cuando te pones en marcha con un exoesqueleto, estás siguiendo un patrón de marcha predeterminado, una especie de guía para tus movimientos. Pero luego, cuando tu capacidad para caminar mejora y tu marcha se vuelve más natural, es cuando entran en juego los controladores basados en GCPs. Este innovador sistema de control se adapta a tu patrón de marcha único, bioinspirado por el movimiento natural de tu cuerpo, ofreciendo una asistencia personalizada y precisa que se ajusta a tus necesidades específicas.
Contar con un control inspirado en los GCPs representa un avance revolucionario en la neuroingeniería aplicada. Aunque este desarrollo aún no se ha integrado en HANK, el exoesqueleto estrella de Gogoa Mobility Robots, se espera que pronto lo esté, llevando la rehabilitación asistida por robots a un nuevo nivel de eficacia y personalización.
El fundamento científico detrás de los GCPs se remonta a más de 50 años, cuando fueron descubiertos en animales invertebrados por investigadores pioneros como Wiersma, Hughes y Wilson en la década de 1960. Estudios posteriores revelaron que estos generadores neurales son capaces de producir patrones motores coordinados sin depender de entradas sensoriales externas, lo que desafió las concepciones previas sobre la necesidad de retroalimentación propioceptiva para la generación de movimientos complejos.

Figura 1. Salidas motoras coordinadas en los nervios de las patas para nadar en la cadena nerviosa abdominal del acocil. A. Tres ciclos de salidas motoras del par de patas en los lados izquierdo y derecho de un segmento abdominal. B. Ocho registros simutáneos mostrando dos ciclos de disparo en axones que inervan cuatro pares de patas en cuatro segmentos del abdomen. (Mulloney y Smarandache, 2010)
La demostración de "patrones motores ficticios" en preparaciones invertebradas fue clave para comprender la naturaleza endógena de la generación de patrones rítmicos. Este fenómeno, donde las neuronas motoras generan actividad similar a la que producirían in vivo incluso en ausencia de entradas sensoriales, proporcionó evidencia sólida de la autonomía de los GCPs en la producción de movimientos coordinados.
La sorpresa inicial ante el descubrimiento de los GCPs radicaba en la creencia predominante de que la generación de patrones motores complejos requería información sensorial periférica. Sin embargo, la investigación posterior reveló que estos generadores neurales son capaces de manejar una variedad de comportamientos rítmicos, incluida la locomoción, la natación y la respiración, tanto en invertebrados como en mamíferos.
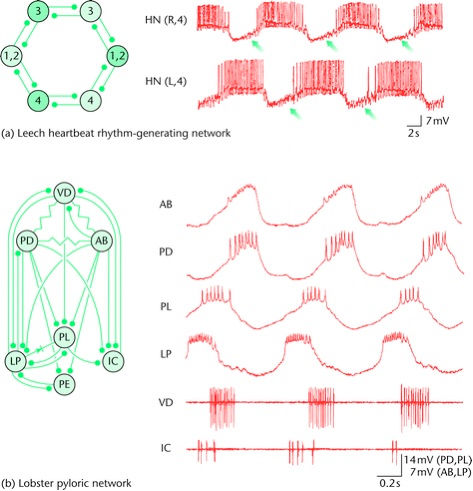
Figura 2. Mecanismos de la ritmicidad del generador central de patrones. a) Ritmicidad basada en redes (generador del ritmo del latido del corazón de la sanguijuela). La red (arriba, izquierda) consiste en un anillo de seis neuronas interconectadas con sinápsis inhibitorias recíprocas. Los pares de neuronas 3 y 4 son particularmente importantes ya que cada uno de los cuales forma un oscilador medio-central. Las neuronas de cada par descargan en antifase (arriba, derecha), mientras las neuronas 1 y 2 forman una unión coordinada entre los medio-centros de la neurona 3 y la neurona 4; la red produce un patrón de dos fases en el cual las neuronas que abren y cierran descargan en antifase (izquierda). Las flechas indican la depolarización lenta que permite a la neurona-off escapar de la inhibición. Modificado de Marder y Calabrese (1996). b) La red pilórica de la langosta es manejada por una neurona osciladora endógena. Izquierda, el complemento de la red neuronal y la interconectividad sináptica (sinápsis inhibitorias, conectores palo-bola; acoplamiento eléctrico, resistencias; acoplamiento eléctrico rectificante, diodo). La neurona AB es osciladora endógena y en la mayor parte de los casos es la manejadora rítmica de la red. La entrada de la neurona AB induce rebote postinhibitorio y meseta en sus neuronas seguidoras y como consecuencia de estos efectos y las interacciones entre las neuronas seguidoras, la red produce una salida nerviosa rítmica multifase (derecha). Neuronas, VD, dilatora ventricular; PL, pilórica tardía; PE, pilórica temprana.
La aplicación de estos conocimientos en entornos clínicos ha revolucionado la rehabilitación de lesiones neurológicas, especialmente en pacientes con lesiones de médula espinal. Los GCPs ofrecen una nueva perspectiva sobre la generación de movimientos, mostrando que la ritmicidad neural puede ser inducida a través de interacciones entre neuronas en redes neuronales o mediante interacciones entre corrientes iónicas en neuronas individuales.
La comprensión de los mecanismos subyacentes a la generación de patrones rítmicos ha llevado al desarrollo de modelos computacionales y experimentales que han revelado la complejidad y la flexibilidad de los GCPs en la producción de múltiples patrones de salida. Esta versatilidad ofrece un potencial prometedor para la personalización de la asistencia a la movilidad en la neurorrehabilitación, adaptándose dinámicamente a las necesidades y capacidades individuales de cada paciente.
La integración de controles inspirados en los GCPs en dispositivos de asistencia a la movilidad como el exoesqueleto HANK de Gogoa Mobility Robots representa un emocionante paso adelante en la aplicación práctica de esta teoría revolucionaria. Al ofrecer una asistencia personalizada y adaptable basada en el patrón de marcha único de cada individuo, los GCPs están destinados a transformar la forma en que se aborda la rehabilitación neurológica, allanando el camino hacia una recuperación más efectiva y satisfactoria para los pacientes.
Para más información sobre la base científica detrás de este desarrollo, puedes consultar los siguientes enlaces: http://www.facmed.unam.mx/Libro-NeuroFisio/FuncionesGenerales/CPGs/CPGs.html
En resumen, los controladores basados en Generadores Centrales de Patrones representan una innovación crucial en la neurorrehabilitación, basada en décadas de investigación científica que ha revelado la capacidad intrínseca del sistema nervioso para generar movimientos coordinados. Con su aplicación clínica y su integración en dispositivos de asistencia a la movilidad, los controladores basados en GCPs prometen mejorar significativamente la calidad de vida de los pacientes con lesiones neurológicas, ofreciendo esperanza y oportunidades para una recuperación más completa y funcional.
-
Controladores Generadores Centrales de Patrones GOGOA



Comentarios